

在冲绳的大海里使用模拟输油管进行SPICE检查试验的模样
- PREVIOUS
- NEXT
November 2021
检查输油管的水中机器人

寻找并检查海中铺设的海底油田输油管的水中机器人被研发出来了。
约占地球表面7成的海洋底下蕴藏着各种各样的天然资源。其中之一就是石油。第二次世界大战以后,全球的海洋油田被不断开发出来,其中,原油生产量越来越大。据2018年国际能源机构(IEA)所公布的《Offshore Energy Outlook》,来自海底油田的原油生产量为1天2600万〜2700万桶(2000年至2016年期间的平均值),约占世界原油生产的3成。
可称为海底油田“生命线”的是,为输送原油而铺设在海底的输油管。输油管一旦破损,就有可能导致严重的海洋汚染,因此其维护和检查极其重要。但是,近年来比潜水员能够到达的水深(最深可达300米)更深的海底原油也正在开始被采掘出来。于是出现了一个课题,就是如何在人难以潜入的深海中确立切实有效地检查输油管的计策。
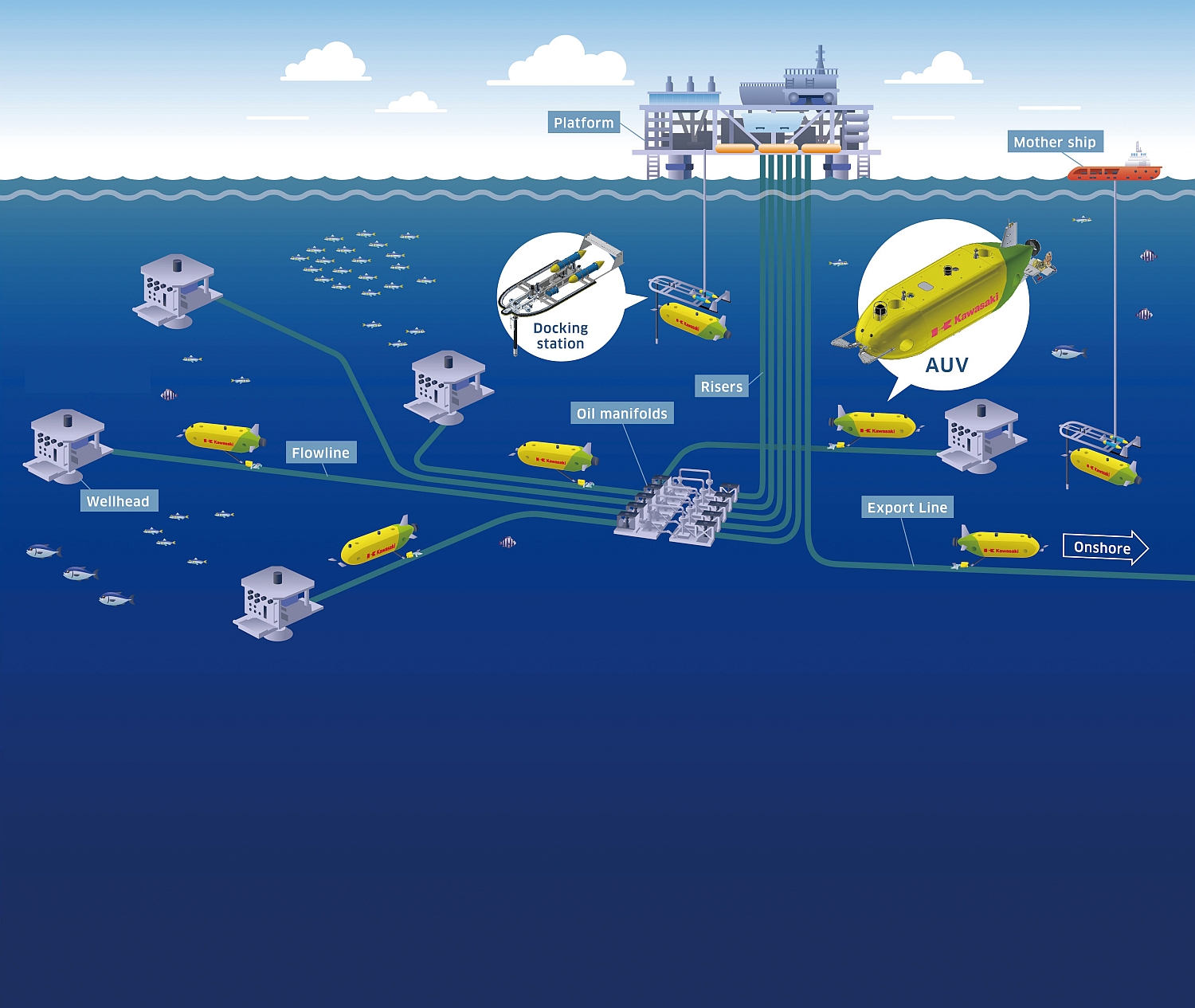
在这种背景下,川崎重工业株式会社研发出了搭载有海底输油管检查用机器人手臂的自律型无人潜水器(Autonomous underwater vehicle: AUV)“SPICE”(Subsea Precise Inspector with Close Eyes)。全长4.5米、宽1.2米、高0.9米的SPICE,像在陆地飞翔的无人机一样可在海中自由移动,同时使用通过音波探测物体的装置(声纳),自主性地接近输油管并实施检查。而且其还具备在水深3000米的超高压环境中从事作业的耐用性。
该司新能源&船舶海洋工程公司的冈矢纪幸谈道:“机器人手臂让安装在手臂前端的检查感应器与输油管保持稳定的最近距离,同时检查输油管的外观和材质。可进行这种作业的AUV在全世界只有这款潜水器。海中无法接收无线,因此作业均为全自动。”
截至目前,潜水员无法到达的深海也开始使用远程操作型无人潜水器(Remotely operated vehicle:ROV)来检查输油管。但是,由于ROV从海洋上的母船通过缆线进行操作和电源供应,因此受限于此只能在缆线的范围内移动和检查。另外,ROV的连动也受到缆线的影响,操控需要非常高的技能。
另一方面,SPICE不需要缆线与母船直接连接,因此相比ROV拥有更广阔的移动范围。一次潜水可检查约20千米的输油管。检查中的速度还可达到平均2海里(1海里时速约为1.85千米),为ROV的2~4倍。
通过在海中进行充电可进行长时间的持续作业,这也是SPICE的一个大特点。SPICE与连接到母船的对接站一同潜入海中后,从对接站离开自动前行,进行输油管探索和检查等作业。如需要充电,就自动返回对接站,充电后继续作业。一次充电约可航行8个小时。
冈矢纪幸继续谈道:“SPICE能够大大缩短检查输油管所需的时间。这样不仅是检查成本,还可以抑制母船航行所产生的二氧化碳排放量。”
川崎重工于2013年开始着手研发AUV,进行了自动对接、水中充电和机器人手臂追踪管道等技术的研发和实证。2017年开始研发将这些技术融合起来的输油管检查用AUV-SPICE。2021年5月,SPICE获得了来自英国企业的第一笔订单。预计未来将承担北海等全球各处的海底输油管检查作业。
冈矢纪幸最后谈道:“我们认为未来SPICE还可以用于海洋风力发电设备的维护。”
作为支撑全球能源供应的后台,日本的水中机器人SPICE在全世界大显身手的日子即将到来。
- PREVIOUS
- NEXT